The real cost of 1-off engineering is the effort to design it. Most of the components are only about 4x the price they would be if bought in maximum bulk.
As a result, anything that can be designed once but fabricated and used many times is a big win. The rifle's many accelerating magnets is a perfect situation to exploit in this way. Each magnet will have it's own control circuit and it's own capacitor. I'll design a circuit once. I'll make 12 of them.
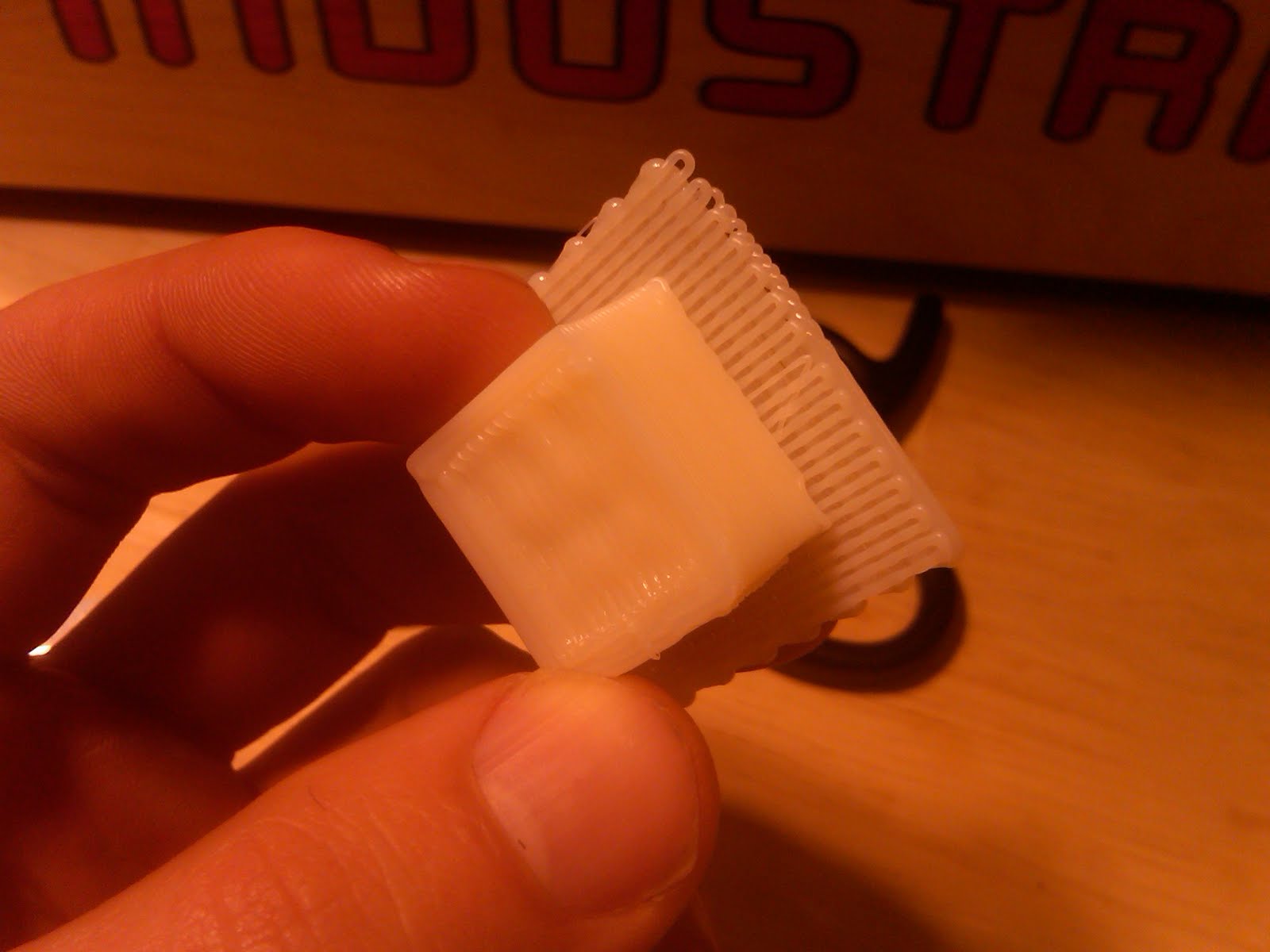
Everything mounts on a meter long, aluminium, square tube. I've spaced the accelerator magnets out with 6cm between them and I'll drill the bar accordingly. Each component will need to have it's own bracket to hold it in place and for this I'm intending to use a 3d-printer that's scheduled to arrive in a few weeks.
In the meantime, there's plenty of time to design the parts I'll be asking the machine to build. For this, I've used OpenSCAD. It's essentially a language for writing objects. This was my first time at writing actual objects.
In case you've never used such a product, it's essentially done adding or removing shapes. I started with the intention of making parts by a combination of subparts. So if there was a half cylinder that would hold the magnet and then a rectangular chunk that would hold it to the aluminium bar, I'd make each of the independantly and then join them. This turned out to have a lot of complexity in exactly how they were joined. It's very easy to end up with one part sticking out of the inside of the other in an unintended way.
Instead, I ended up making an object with a series of added shapes and a series of removed shapes with very minimual heiarchy.
As you can see from the code below, it was only about half way through that I also chose to start using variables instead of hard coding the sizes. (For whatever reason it cleared out my tabbing.)
//Coil //85mm long
//29mm wide (14.5 rad)
//Cap
//50.5mm wide
//92.6mm long
//Bar
//19.4mm wide
//8mm hole
//10mm from hole center to bar top
//Circuits
//45mm Outer range
//35mm inner range (not w diode)
//20mm high (w diode sticking out)
//LittleBolt
//Nut: 9.35mm
//Bolt: 4.65mm
//Head: 8.98mm
//Thread lenth: 15mm
//BigBolt
//Bolt:12.58mm
//Threads: 30mm
coilRad = 15;
coilLength = 20;
coilWall = 5;
capRad = 26;
boltRad = 4.5;
lilBoltRad = 2.5;
circuitOuterRange = 45;
circuitInnerRange = 35;
circuitHeight = 20;
circuitBoardWidth = 3;
circuitWidth = 3;
circuitBaseWidth=14;
circuitBoltSpacing = 10;
module circuitHolder()
{
difference()
{
union() //added
{
cube(size=[circuitWidth*2+circuitBoardWidth,circuitOuterRange+2*circuitWidth,circuitHeight], center=true);
translate([0,0,-circuitHeight/2-1])
cube(size=[circuitBaseWidth,circuitOuterRange+2*circuitWidth,circuitWidth],center=true);
}
union() //removed
{
translate([0,0,1])
cube(size=[circuitWidth*4+circuitBoardWidth, circuitInnerRange, circuitHeight+2], center=true);
translate([0,0,1])
cube(size=[circuitBoardWidth, circuitOuterRange, circuitHeight+2], center=true);
translate([0,circuitBoltSpacing/2,0])
cylinder(h=circuitHeight+2*circuitWidth+2,r=lilBoltRad,center=true);
translate([0,-circuitBoltSpacing/2,0])
cylinder(h=circuitHeight+2*circuitWidth+2,r=lilBoltRad,center=true);
}
}
}
module coilCradleTop()
{
//add parts, then remove parts
difference()
{
union() //added parts
{
cylinder(h = coilLength, r=(coilRad+coilWall), center = true); //Outer cylinder
translate([coilRad+circuitBaseWidth/2+coilWall-1,0,0]) //Circuit holder
cube(size=[circuitBaseWidth+2,circuitWidth*2,coilLength], center=true);
translate([-coilRad-circuitBaseWidth/2-coilWall+1,0,0]) //Circuit holder
cube(size=[circuitBaseWidth+2,circuitWidth*2,coilLength], center=true);
}
union() //removed parts
{
cylinder(h = coilLength+2, r=coilRad, center = true); //inner cylinder
translate([0,36/2,0]) //Cube to remove top of cylinder
cube(size=[100,36,100], center=true);
translate([coilRad+circuitBaseWidth/2+coilWall-1,0,0])
{
translate([0,0,circuitBoltSpacing/2])
rotate([90,0,00])
cylinder(h=100,r=lilBoltRad,center=true);
translate([0,0,-circuitBoltSpacing/2])
rotate([90,0,0])
cylinder(h=100,r=lilBoltRad,center=true);
}
translate([-coilRad-circuitBaseWidth/2-coilWall+1,0,0])
{
translate([0,0,circuitBoltSpacing/2])
rotate([90,0,00])
cylinder(h=100,r=lilBoltRad,center=true);
translate([0,0,-circuitBoltSpacing/2])
rotate([90,0,0])
cylinder(h=100,r=lilBoltRad,center=true);
}
}
}
}
module coilCradle2()
{
//add parts, then remove parts
difference()
{
union() //added parts
{
translate([0,-70/2-10,0])
cube(size=[30,70,20],center=true); //Main block,
cylinder(h = coilLength, r1 = (coilRad+coilWall), r2 = 20, center = true); //Outer cylinder
translate([coilRad+circuitBaseWidth/2+coilWall-1,0,0]) //Circuit holder
cube(size=[circuitBaseWidth+2,circuitWidth*2,coilLength], center=true);
translate([-coilRad-circuitBaseWidth/2-coilWall+1,0,0]) //Circuit holder
cube(size=[circuitBaseWidth+2,circuitWidth*2,coilLength], center=true);
}
union() //removed parts
{
cylinder(h = coilLength+2, r=coilRad, center = true); //inner cylinder
translate([0,36/2,0]) //Cube to remove top of cylinder
cube(size=[100,36,100], center=true);
translate([0,-70,0])
cube(size=[20,20,100],center=true);
translate([0,-70,0]) //Lower bolt
rotate([0,90,0])
cylinder(h=80,r1=boltRad,r2=boltRad, center=true);
translate([0,-40,0]) //Upper bolt
rotate([0,90,0])
cylinder(h=80,r1=boltRad,r2=boltRad, center=true);
translate([0,-40,0]) //removed main section (for weight)
cube(size=[20,30,20],center=true);
translate([coilRad+circuitBaseWidth/2+coilWall-1,0,0])
{
translate([0,0,circuitBoltSpacing/2])
rotate([90,0,00])
cylinder(h=100,r=lilBoltRad,center=true);
translate([0,0,-circuitBoltSpacing/2])
rotate([90,0,0])
cylinder(h=100,r=lilBoltRad,center=true);
}
translate([-coilRad-circuitBaseWidth/2-coilWall+1,0,0])
{
translate([0,0,circuitBoltSpacing/2])
rotate([90,0,00])
cylinder(h=100,r=lilBoltRad,center=true);
translate([0,0,-circuitBoltSpacing/2])
rotate([90,0,0])
cylinder(h=100,r=lilBoltRad,center=true);
}
}
}
}
module capHolder()
{
difference()
{
union() //Added parts
{
cylinder(h=70, r1=(52+10)/2, r2=(52+10)/2,center=true); //Outer cup
translate([0,(52+10)/2+20/2-4,0]) //Main bolt holder
cube(size=[30,30,70],center=true);
}
union() //Removed parts
{
translate([0,0,5])
cylinder(h = 70, r1=52/2, r2 = 52/2, center=true); //Inner cup
translate([0,0,-15])
{
translate([0,(52+10)/2+20/2-2,0])
cube(size=[20,15,100],center=true);
translate([0,60,10])
rotate([90,0,0])
cylinder(h=40,r1=boltRad,r2=boltRad, center=true);
translate([0,60,40])
rotate([90,0,0])
cylinder(h=40,r1=boltRad,r2=boltRad, center=true);
translate([0,(52+10)/2+20/2+7,50])
cube(size=[boltRad*2,10,20],center=true);
translate([0,(52+10)/2+20/2+7,-30])
cube(size=[boltRad*2,10,80],center=true);
}
//Removed part for weight reasons
translate([0,0,15])
{
rotate([0,90,33])
cylinder(h=100,r=10,center=true);
rotate([0,90,-33])
cylinder(h=100,r=10,center=true);
rotate([0,90,90])
translate([0,0,-50])
cylinder(h=100,r=10,center=true);
}
//Removed part for weight reasons
translate([0,0,-15])
{
rotate([0,90,33])
cylinder(h=100,r=10,center=true);
rotate([0,90,-33])
cylinder(h=100,r=10,center=true);
rotate([0,90,90])
translate([0,0,-50])
cylinder(h=100,r=10,center=true);
}
}
}
}
translate([20+14/2,-25,0])
rotate([90,0,0])
circuitHolder();
translate([-70,70,0])
rotate([90,90,0])
capHolder();
translate([0,5,0])
rotate([180,0,0])
coilCradle2();
translate([0,-5,0])
coilCradleTop();